Redis Sentinel实现(上)
1. Redis Sentinel 介绍和部署
sentinel.c文件详细注释:Redis Sentinel详细注释
本文会分为两篇分别接受Redis Sentinel的实现,本篇主要将Redis哨兵的执行过程和执行的内容。
标题4将会在Redis Sentinel实现(下)中详细剖析。
2. Redis Sentinel 的执行过程和初始化
Sentinel本质上是一个运行在特殊模式下的Redis服务器,无论如何,都是执行服务器的main来启动。主函数中关于Sentinel启动的代码如下:
int main(int argc, char **argv) {
// 1. 检查开启哨兵模式的两种方式
server.sentinel_mode = checkForSentinelMode(argc,argv);
// 2. 如果已开启哨兵模式,初始化哨兵的配置
if (server.sentinel_mode) {
initSentinelConfig();
initSentinel();
}
// 3. 载入配置文件
loadServerConfig(configfile,options);
// 开启哨兵模式,哨兵模式和集群模式只能开启一种
if (!server.sentinel_mode) {
// 在不是哨兵模式下,会载入AOF文件和RDB文件,打印内存警告,集群模式载入数据等等操作。
} else {
sentinelIsRunning();
}
}
以上过程可以分为四步:
- 检查是否开启哨兵模式
- 初始化哨兵的配置
- 载入配置文件
- 开启哨兵模式
2.1 检查是否开启哨兵模式
在Redis Sentinel 介绍与部署文章中,介绍了两种开启的方法:
redis-sentinel sentinel.confredis-server sentinel.conf --sentinel
主函数中调用了checkForSentinelMode()函数来判断是否开启哨兵模式。
int checkForSentinelMode(int argc, char **argv) {
int j;
if (strstr(argv[0],"redis-sentinel") != NULL) return 1;
for (j = 1; j < argc; j++)
if (!strcmp(argv[j],"--sentinel")) return 1;
return 0;
}
如果开启了哨兵模式,就会将server.sentinel_mode设置为1。
2.2 初始化哨兵的配置
在主函数中调用了两个函数initSentinelConfig()和initSentinel(),前者用来初始化Sentinel节点的默认配置,后者用来初始化Sentinel节点的状态。sentinel.c文件详细注释:Redis Sentinel详细注释
在sentinel.c文件中定义了一个全局变量sentinel,它是struct sentinelState类型的,用于保存当前Sentinel的状态。
initSentinelConfig(),初始化哨兵节点的默认端口为26379。
// 设置Sentinel的默认端口,覆盖服务器的默认属性
void initSentinelConfig(void) {
server.port = REDIS_SENTINEL_PORT;
}
initSentinel(),初始化哨兵节点的状态
// 执行Sentinel模式的初始化操作
void initSentinel(void) {
unsigned int j;
/* Remove usual Redis commands from the command table, then just add
* the SENTINEL command. */
// 将服务器的命令表清空
dictEmpty(server.commands,NULL);
// 只添加Sentinel模式的相关命令,Sentinel模式下一共11个命令
for (j = 0; j < sizeof(sentinelcmds)/sizeof(sentinelcmds[0]); j++) {
int retval;
struct redisCommand *cmd = sentinelcmds+j;
retval = dictAdd(server.commands, sdsnew(cmd->name), cmd);
serverAssert(retval == DICT_OK);
}
/* Initialize various data structures. */
// 初始化各种Sentinel状态的数据结构
// 当前纪元,用于实现故障转移操作
sentinel.current_epoch = 0;
// 监控的主节点信息的字典
sentinel.masters = dictCreate(&instancesDictType,NULL);
// TILT模式
sentinel.tilt = 0;
sentinel.tilt_start_time = 0;
// 最后执行时间处理程序的时间
sentinel.previous_time = mstime();
// 正在执行的脚本数量
sentinel.running_scripts = 0;
// 用户脚本的队列
sentinel.scripts_queue = listCreate();
// Sentinel通过流言协议接收关于主服务器的ip和port
sentinel.announce_ip = NULL;
sentinel.announce_port = 0;
// 故障模拟
sentinel.simfailure_flags = SENTINEL_SIMFAILURE_NONE;
// Sentinel的ID置为0
memset(sentinel.myid,0,sizeof(sentinel.myid));
}
在哨兵模式下,只有11条命令可以使用,因此要用哨兵模式的命令表来代替Redis原来的命令表。
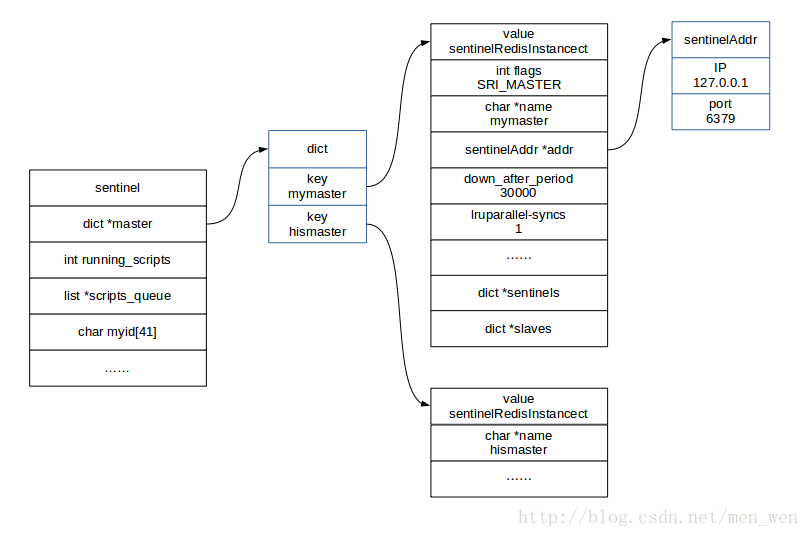
之后就是初始化sentinel的成员变量。我们重点关注这几个成员:
- dict *masters :当前哨兵节点监控的主节点字典。字典的键是主节点实例的名字,字典的值是一个指针,指向一个
sentinelRedisInstance类型的结构。 - int running_scripts : 当前正在执行的脚本的数量。
- list *scripts_queue :保存要执行用户脚本的队列。
2.3 载入配置文件
在启动哨兵节点时,要指定一个.conf配置文件,配置文件可以将配置项分为两类。
-
sentinel monitor \ \ \ \
- 例如:
sentinel monitor mymaster 127.0.0.1 6379 2 - 当前Sentinel节点监控 127.0.0.1:6379 这个主节点
- 2 代表判断主节点失败至少需要2个Sentinel节点节点同意
- mymaster 是主节点的别名
- 例如:
-
sentinel xxxxxx \ xxxxxx
- 例如:
sentinel down-after-milliseconds mymaster 30000 - 每个Sentinel节点都要定期PING命令来判断Redis数据节点和其余Sentinel节点是否可达,如果超过30000毫秒且没有回复,则判定不可达。
- 例如:
sentinel parallel-syncs mymaster 1 - 当Sentinel节点集合对主节点故障判定达成一致时,Sentinel领导者节点会做故障转移操作,选出新的主节点,原来的从节点会向新的主节点发起复制操作,限制每次向新的主节点发起复制操作的从节点个数为1。
- 例如:
配置文件以这样的格式告诉哨兵节点,监控的主节点是谁,有什么样的限制条件。如果想要监控多个主节点,只需按照此格式在配置文件中多写几份。
既然配置文件都是如此,那么处理的函数也是如此处理,由于配置项很多,但是大体相似,所以我们列举处理示例的代码块:
sentinelRedisInstance *ri;
// SENTINEL monitor选项
if (!strcasecmp(argv[0],"monitor") && argc == 5) {
/* monitor <name> <host> <port> <quorum> */
int quorum = atoi(argv[4]); //获取投票数
// 投票数必须大于等于1
if (quorum <= 0) return "Quorum must be 1 or greater.";
// 创建一个主节点实例,并加入到Sentinel所监控的master字典中
if (createSentinelRedisInstance(argv[1],SRI_MASTER,argv[2],
atoi(argv[3]),quorum,NULL) == NULL)
{
switch(errno) {
case EBUSY: return "Duplicated master name.";
case ENOENT: return "Can't resolve master instance hostname.";
case EINVAL: return "Invalid port number";
}
}
// sentinel down-after-milliseconds选项
} else if (!strcasecmp(argv[0],"down-after-milliseconds") && argc == 3) {
/* down-after-milliseconds <name> <milliseconds> */
// 获取根据name查找主节点实例
ri = sentinelGetMasterByName(argv[1]);
if (!ri) return "No such master with specified name.";
// 设置主节点实例的主观下线的判断时间
ri->down_after_period = atoi(argv[2]);
if (ri->down_after_period <= 0)
return "negative or zero time parameter.";
// 根据ri主节点的down_after_period字段的值设置所有连接该主节点的从节点和Sentinel实例的主观下线的判断时间
sentinelPropagateDownAfterPeriod(ri);
载入配置文件主要使用了两个函数createSentinelRedisInstance()和sentinelGetMasterByName()。前者用来根据指定监控的主节点来创建实例,而后者则要根据名字找到对应的主节点实例来设置配置的参数。
2.3.1 创建实例
调用createSentinelRedisInstance()函数创建被该哨兵节点所监控的主节点实例,然后将新创建的主节点实例保存到sentinel.masters字典中,也就是初始化时创建的字典。该函数是一个通用的函数,根据参数flags不同创建不同类型的实例,并且将实例保存到不同的字典中:
- SRI_MASTER:创建一个主节点实例,保存到当前哨兵节点监控的主节点字典中。
- SRI_SLAVE:创建一个从节点实例,保存到主节点实例的从节点字典中。
- SRI_SENTINE:创建一个哨兵节点实例,保存到其他监控该主节点实例的哨兵节点的字典中。
我们先列出函数的原型:
sentinelRedisInstance *createSentinelRedisInstance(char *name, int flags, char *hostname, int port, int quorum, sentinelRedisInstance *master)
- 如果flags设置了
SRI_MASTER,该实例被添加进sentinel.masters表中 - 如果flags设置了
SRI_SLAVE或者SRI_SENTINEL,master一定不为空 并且该实例被添加到master->slaves或master->sentinels中 - 如果该实例是从节点或者是哨兵节点,
name参数被忽略,并且被自动设置为hostname:port
当根据flags能够获取实例的类型后,就会初始化一个sentinelRedisInstance类型的实例,添加到对应的字典中。
typedef struct sentinelRedisInstance {
// 标识值,记录了当前Redis实例的类型和状态
int flags; /* See SRI_... defines */
// 实例的名字
// 主节点的名字由用户在配置文件中设置
// 从节点以及Sentinel节点的名字由Sentinel自动设置,格式为:ip:port
char *name; /* Master name from the point of view of this sentinel. */
// 实例运行的独一无二ID
char *runid; /* Run ID of this instance, or unique ID if is a Sentinel.*/
// 配置纪元,用于实现故障转移
uint64_t config_epoch; /* Configuration epoch. */
// 实例地址:ip和port
sentinelAddr *addr; /* Master host. */
// 实例的连接,有可能是被Sentinel共享的
instanceLink *link; /* Link to the instance, may be shared for Sentinels. */
// 最近一次通过 Pub/Sub 发送信息的时间
mstime_t last_pub_time; /* Last time we sent hello via Pub/Sub. */
// 只有被Sentinel实例使用
// 最近一次接收到从Sentinel发送来hello的时间
mstime_t last_hello_time;
// 最近一次回复SENTINEL is-master-down的时间
mstime_t last_master_down_reply_time; /* Time of last reply to
SENTINEL is-master-down command. */
// 实例被判断为主观下线的时间
mstime_t s_down_since_time; /* Subjectively down since time. */
// 实例被判断为客观下线的时间
mstime_t o_down_since_time; /* Objectively down since time. */
// 实例无响应多少毫秒之后被判断为主观下线
// 由SENTINEL down-after-millisenconds配置设定
mstime_t down_after_period; /* Consider it down after that period. */
// 从实例获取INFO命令回复的时间
mstime_t info_refresh; /* Time at which we received INFO output from it. */
// 实例的角色
int role_reported;
// 角色更新的时间
mstime_t role_reported_time;
// 最近一次从节点的主节点地址变更的时间
mstime_t slave_conf_change_time; /* Last time slave master addr changed. */
/* Master specific. */
/*----------------------------------主节点特有的属性----------------------------------*/
// 其他监控相同主节点的Sentinel
dict *sentinels; /* Other sentinels monitoring the same master. */
// 如果当前实例是主节点,那么slaves保存着该主节点的所有从节点实例
// 键是从节点命令,值是从节点服务器对应的sentinelRedisInstance
dict *slaves; /* Slaves for this master instance. */
// 判定该主节点客观下线的投票数
// 由SENTINEL monitor <master-name> <ip> <port> <quorum>配置
unsigned int quorum;/* Number of sentinels that need to agree on failure. */
// 在故障转移时,可以同时对新的主节点进行同步的从节点数量
// 由sentinel parallel-syncs <master-name> <number>配置
int parallel_syncs; /* How many slaves to reconfigure at same time. */
// 连接主节点和从节点的认证密码
char *auth_pass; /* Password to use for AUTH against master & slaves. */
/*----------------------------------从节点特有的属性----------------------------------*/
// 从节点复制操作断开时间
mstime_t master_link_down_time; /* Slave replication link down time. */
// 按照INFO命令输出的从节点优先级
int slave_priority; /* Slave priority according to its INFO output. */
// 故障转移时,从节点发送SLAVEOF <new>命令的时间
mstime_t slave_reconf_sent_time; /* Time at which we sent SLAVE OF <new> */
// 如果当前实例是从节点,那么保存该从节点连接的主节点实例
struct sentinelRedisInstance *master; /* Master instance if it's slave. */
// INFO命令的回复中记录的主节点的IP
char *slave_master_host; /* Master host as reported by INFO */
// INFO命令的回复中记录的主节点的port
int slave_master_port; /* Master port as reported by INFO */
// INFO命令的回复中记录的主从服务器连接的状态
int slave_master_link_status; /* Master link status as reported by INFO */
// 从节点复制偏移量
unsigned long long slave_repl_offset; /* Slave replication offset. */
/*----------------------------------故障转移的属性----------------------------------*/
// 如果这是一个主节点实例,那么leader保存的是执行故障转移的Sentinel的runid
// 如果这是一个Sentinel实例,那么leader保存的是当前这个Sentinel实例选举出来的领头的runid
char *leader;
// leader字段的纪元
uint64_t leader_epoch; /* Epoch of the 'leader' field. */
// 当前执行故障转移的纪元
uint64_t failover_epoch; /* Epoch of the currently started failover. */
// 故障转移操作的状态
int failover_state; /* See SENTINEL_FAILOVER_STATE_* defines. */
// 故障转移操作状态改变的时间
mstime_t failover_state_change_time;
// 最近一次故障转移尝试开始的时间
mstime_t failover_start_time; /* Last failover attempt start time. */
// 更新故障转移状态的最大超时时间
mstime_t failover_timeout; /* Max time to refresh failover state. */
// 记录故障转移延迟的时间
mstime_t failover_delay_logged;
// 晋升为新主节点的从节点实例
struct sentinelRedisInstance *promoted_slave;
// 通知admin的可执行脚本的地址,如果设置为空,则没有执行的脚本
char *notification_script;
// 通知配置的client的可执行脚本的地址,如果设置为空,则没有执行的脚本
char *client_reconfig_script;
// 缓存INFO命令的输出
sds info; /* cached INFO output */
} sentinelRedisInstance;
该实例用来抽象描述一个节点,可以是主节点、从节点或者是哨兵节点。
2.3.2 查找主节点
在配置文件中分的那两个部分,第一部分是创建上面给出的结构实例,另一部分则是配置其中的一部分成员。因此,第一步要根据名字在 哨兵节点的主节点字典 中找到主节点实例。
sentinelRedisInstance *sentinelGetMasterByName(char *name) {
sentinelRedisInstance *ri;
sds sdsname = sdsnew(name);
// 从Sentinel所监视的所有主节点中寻找名字为name的主节点,找到返回
ri = dictFetchValue(sentinel.masters,sdsname);
sdsfree(sdsname);
return ri;
}
当找到并返回主节点实例后,就可以配置其变量了。例如:ri->down_after_period = atoi(argv[2])
2.4 开启 Sentinel
载入完配置文件,就会调用sentinelIsRunning()函数开启Sentinel。该函数主要干了这几个事:
- 检查配置文件是否可写,因为要重写配置文件。
- 为没有
runid的哨兵节点分配 ID,并重写到配置文件中,并且打印到日志中。 - 生成一个
+monitor事件通知。
所以在启动一个哨兵节点时,查看日志会发现:
12775:X 28 May 15:14:34.953 # Sentinel ID is a4dce0267abdb89f7422c9a42960e6cb6e4
d565a
12775:X 28 May 15:14:34.953 # +monitor master mymaster 127.0.0.1 6379 quorum 2
至此,就正式启动了哨兵节点。我们用图片的方式来描述一下一个哨兵节点监控两个主节点的情况:
3. Redis Sentinel 的所有操作
Redis哨兵的操作,都是放在时间处理器中执行。服务器在初始化时会创建时间事件,并安装执行时间事件的处理函数serverCron(),在该函数调用sentinelTimer()函数(如下代码所示)来每100ms执行一次哨兵的定时中断,或者叫执行哨兵的任务。sentinel.c文件详细注释:Redis Sentinel详细注释
run_with_period(100) {
if (server.sentinel_mode) sentinelTimer();
}
sentinelTimer()函数就是Sentinel的主函数,他的执行过程非常清晰,我们直接给出代码:
void sentinelTimer(void) {
// 先检查Sentinel是否需要进入TITL模式,更新最近一次执行Sentinel模式的周期函数的时间
sentinelCheckTiltCondition();
// 对Sentinel监控的所有主节点进行递归式的执行周期性操作
sentinelHandleDictOfRedisInstances(sentinel.masters);
// 运行在队列中等待的脚本
sentinelRunPendingScripts();
// 清理已成功执行的脚本,重试执行错误的脚本
sentinelCollectTerminatedScripts();
// 杀死执行超时的脚本,等到下个周期在sentinelCollectTerminatedScripts()函数中重试执行
sentinelKillTimedoutScripts();
/* We continuously change the frequency of the Redis "timer interrupt"
* in order to desynchronize every Sentinel from every other.
* This non-determinism avoids that Sentinels started at the same time
* exactly continue to stay synchronized asking to be voted at the
* same time again and again (resulting in nobody likely winning the
* election because of split brain voting). */
// 我们不断改变Redis定期任务的执行频率,以便使每个Sentinel节点都不同步,这种不确定性可以避免Sentinel在同一时间开始完全继续保持同步,当被要求进行投票时,一次又一次在同一时间进行投票,因为脑裂导致有可能没有胜选者
server.hz = CONFIG_DEFAULT_HZ + rand() % CONFIG_DEFAULT_HZ;
}
我们可以将哨兵的任务按顺序分为四部分:
- TILT 模式判断
- 执行周期性任务。例如:定期发送PING、hello信息等等。
- 执行脚本任务
- 脑裂
接下来,依次分析
3.1 TILT 模式判断
TILT 模式是一种特殊的保护模式:当 Sentinel 发现系统有些不对劲时,Sentinel 就会进入 TILT 模式。
因为 Sentinel 的时间中断器默认每秒执行 10 次,所以我们预期时间中断器的两次执行之间的间隔为 100 毫秒左右。但是出现以下情况会出现异常:
- Sentinel进程在某时被阻塞,有很多种原因,负载过大,IO任务密集,进程被信号停止等等。
- 系统时钟发送明显变化
Sentinel 的做法是(如下sentinelCheckTiltCondition()函数所示),记录上一次时间中断器执行时的时间,并将它和这一次时间中断器执行的时间进行对比:
- 如果两次调用时间之间的差距为负值,或者非常大(超过 2 秒钟),那么 Sentinel 进入 TILT 模式。
- 如果 Sentinel 已经进入 TILT 模式,那么 Sentinel 延迟退出 TILT 模式的时间。
void sentinelCheckTiltCondition(void) {
mstime_t now = mstime();
// 最后一次执行Sentinel时间处理程序的时间过去了过久
mstime_t delta = now - sentinel.previous_time;
// 差为负数,或者大于2秒
if (delta < 0 || delta > SENTINEL_TILT_TRIGGER) {
// 设置Sentinel进入TILT状态
sentinel.tilt = 1;
// 设置进入TILT状态的开始时间
sentinel.tilt_start_time = mstime();
sentinelEvent(LL_WARNING,"+tilt",NULL,"#tilt mode entered");
}
// 设置最近一次执行Sentinel时间处理程序的时间
sentinel.previous_time = mstime();
}
当 Sentinel 进入 TILT 模式时,它仍然会继续监视所有目标,但是:
- 它不再执行任何操作,比如故障转移。
- 当有实例向这个 Sentinel 发送
SENTINEL is-master-down-by-addr命令时,Sentinel 返回负值:因为这个 Sentinel 所进行的下线判断已经不再准确。
如果 TILT 可以正常维持 30 秒钟,那么 Sentinel 退出 TILT 模式。
3.2 执行周期性任务
我们先来看看在执行周期性任务的函数sentinelHandleDictOfRedisInstances()
void sentinelHandleDictOfRedisInstances(dict *instances) {
dictIterator *di;
dictEntry *de;
sentinelRedisInstance *switch_to_promoted = NULL;
/* There are a number of things we need to perform against every master. */
di = dictGetIterator(instances);
// 遍历字典中所有的实例
while((de = dictNext(di)) != NULL) {
sentinelRedisInstance *ri = dictGetVal(de);
// 对指定的ri实例执行周期性操作
sentinelHandleRedisInstance(ri);
// 如果ri实例是主节点
if (ri->flags & SRI_MASTER) {
// 递归的对主节点从属的从节点执行周期性操作
sentinelHandleDictOfRedisInstances(ri->slaves);
// 递归的对监控主节点的Sentinel节点执行周期性操作
sentinelHandleDictOfRedisInstances(ri->sentinels);
// 如果ri实例处于完成故障转移操作的状态,所有从节点已经完成对新主节点的同步
if (ri->failover_state == SENTINEL_FAILOVER_STATE_UPDATE_CONFIG) {
// 设置主从转换的标识
switch_to_promoted = ri;
}
}
}
// 如果主从节点发生了转换
if (switch_to_promoted)
// 将原来的主节点从主节点表中删除,并用晋升的主节点替代
// 意味着已经用新晋升的主节点代替旧的主节点,包括所有从节点和旧的主节点从属当前新的主节点
sentinelFailoverSwitchToPromotedSlave(switch_to_promoted);
dictReleaseIterator(di);
}
该函数可以分为两部分:
- 递归的对当前哨兵所监控的所有主节点
sentinel.masters,和所有主节点的所有从节点ri->slaves,和所有监控该主节点的其他所有哨兵节点ri->sentinels执行周期性操作。也就是sentinelHandleRedisInstance()函数。 - 在执行操作的过程中,可能发生主从切换的情况,因此要给所有原来主节点的从节点(除了被选为当做晋升的从节点)发送
slaveof命令去复制新的主节点(晋升为主节点的从节点)。对应sentinelFailoverSwitchToPromotedSlave()函数。
由于这里的操作过多,因此先跳过,单独在标题4进行剖析。
3.3 执行脚本任务
在Sentinel的定时任务分为三步,也就是sentinelTimer()哨兵模式主函数中的三个函数:
sentinelRunPendingScripts():运行在队列中等待的脚本。sentinelCollectTerminatedScripts():清理已成功执行的脚本,重试执行错误的脚本。sentinelKillTimedoutScripts():杀死执行超时的脚本,等到下个周期在sentinelCollectTerminatedScripts()函数中重试执行。
3.3.1 准备脚本
我们先来说明脚本任务是如何加入到sentinel.scripts_queue中的。
首先在Sentinel中有两种脚本,分别是,都定义在sentinelRedisInstance结构中
- 通知admin的脚本。
char *notification_script - 重配置client的脚本。
char *client_reconfig_script
在发生主从切换后,会调用sentinelCallClientReconfScript()函数,将 重配置client的脚本 放入脚本队列中。
在发生LL_WARNING级别的事件通知时,会调用sentinelEvent()函数,将 通知admin的脚本 放入脚本队列中。
然而这两个函数,都会调用最底层的sentinelScheduleScriptExecution()函数将脚本添加到脚本链表队列中。该函数源码如下:
#define SENTINEL_SCRIPT_MAX_ARGS 16
// 将给定参数和脚本放入用户脚本队列中
void sentinelScheduleScriptExecution(char *path, ...) {
va_list ap;
char *argv[SENTINEL_SCRIPT_MAX_ARGS+1];
int argc = 1;
sentinelScriptJob *sj;
va_start(ap, path);
// 将参数保存到argv中
while(argc < SENTINEL_SCRIPT_MAX_ARGS) {
argv[argc] = va_arg(ap,char*);
if (!argv[argc]) break;
argv[argc] = sdsnew(argv[argc]); /* Copy the string. */
argc++;
}
va_end(ap);
// 第一个参数是脚本的路径
argv[0] = sdsnew(path);
// 分配脚本任务结构的空间
sj = zmalloc(sizeof(*sj));
sj->flags = SENTINEL_SCRIPT_NONE; //脚本限制
sj->retry_num = 0; //执行次数
sj->argv = zmalloc(sizeof(char*)*(argc+1)); //参数列表
sj->start_time = 0; //开始时间
sj->pid = 0; //执行脚本子进程的pid
// 设置脚本的参数列表
memcpy(sj->argv,argv,sizeof(char*)*(argc+1));
// 添加到脚本队列中
listAddNodeTail(sentinel.scripts_queue,sj);
/* Remove the oldest non running script if we already hit the limit. */
// 如果队列长度大于256个,那么删除最旧的脚本,只保留255个
if (listLength(sentinel.scripts_queue) > SENTINEL_SCRIPT_MAX_QUEUE) {
listNode *ln;
listIter li;
listRewind(sentinel.scripts_queue,&li);
// 遍历脚本链表队列
while ((ln = listNext(&li)) != NULL) {
sj = ln->value;
// 跳过正在执行的脚本
if (sj->flags & SENTINEL_SCRIPT_RUNNING) continue;
/* The first node is the oldest as we add on tail. */
// 删除最旧的脚本
listDelNode(sentinel.scripts_queue,ln);
// 释放一个脚本任务结构和所有关联的数据
sentinelReleaseScriptJob(sj);
break;
}
serverAssert(listLength(sentinel.scripts_queue) <=
SENTINEL_SCRIPT_MAX_QUEUE);
}
}
Redis使用了sentinelScriptJob结构来管理脚本的一些信息,正如上述代码初始化那一部分。
而且当前哨兵维护的哨兵队列最多只能保留最新的255个脚本,如果脚本过多就会从队列中删除对旧的脚本。
3.3.2 执行脚本
当要执行脚本放入了队列中,等到周期性函数sentinelTimer()时,就会执行。我们来执行脚本的函数sentinelRunPendingScripts()代码:
void sentinelRunPendingScripts(void) {
listNode *ln;
listIter li;
mstime_t now = mstime();
/* Find jobs that are not running and run them, from the top to the
* tail of the queue, so we run older jobs first. */
listRewind(sentinel.scripts_queue,&li);
// 遍历脚本链表队列,如果没有超过同一时刻最多运行脚本的数量,找到没有正在运行的脚本
while (sentinel.running_scripts < SENTINEL_SCRIPT_MAX_RUNNING &&
(ln = listNext(&li)) != NULL)
{
sentinelScriptJob *sj = ln->value;
pid_t pid;
/* Skip if already running. */
// 跳过正在运行的脚本
if (sj->flags & SENTINEL_SCRIPT_RUNNING) continue;
/* Skip if it's a retry, but not enough time has elapsed. */
// 该脚本没有到达重新执行的时间,跳过
if (sj->start_time && sj->start_time > now) continue;
// 设置正在执行标志
sj->flags |= SENTINEL_SCRIPT_RUNNING;
// 开始执行时间
sj->start_time = mstime();
// 执行次数加1
sj->retry_num++;
// 创建子进程执行
pid = fork();
// fork()失败,报告错误
if (pid == -1) {
sentinelEvent(LL_WARNING,"-script-error",NULL,
"%s %d %d", sj->argv[0], 99, 0);
sj->flags &= ~SENTINEL_SCRIPT_RUNNING;
sj->pid = 0;
// 子进程执行的代码
} else if (pid == 0) {
/* Child */
// 执行该脚本
execve(sj->argv[0],sj->argv,environ);
/* If we are here an error occurred. */
// 如果执行_exit(2),表示发生了错误,不能重新执行
_exit(2); /* Don't retry execution. */
// 父进程,更新脚本的pid,和同时执行脚本的个数
} else {
sentinel.running_scripts++;
sj->pid = pid;
// 并且通知事件
sentinelEvent(LL_DEBUG,"+script-child",NULL,"%ld",(long)pid);
}
}
}
因为Redis是单线程架构的,所以和持久化一样,执行脚本需要创建一个子进程。
- 子进程:执行没有正在执行和已经到了执行时间的脚本任务。
- 父进程:更新脚本的信息。例如:正在执行的个数和执行脚本的子进程的
pid等等。
父进程更新完脚本的信息后就会继续执行下一个sentinelCollectTerminatedScripts()函数
3.3.3 脚本清理工作
- 如果在子进程执行的脚本已经执行完成,则可以从脚本队列中将其删除。
- 如果在子进程执行的脚本执行出错,但是可以在规定时间后重新执行,那么设置其执行的时间,下个周期重新执行。
- 如果在子进程执行的脚本执行出错,但是无法在执行,那么也会脚本队里中将其删除。
函数sentinelCollectTerminatedScripts()源码如下:
void sentinelCollectTerminatedScripts(void) {
int statloc;
pid_t pid;
// 接受子进程退出码
// WNOHANG:如果没有子进程退出,则立刻返回
while ((pid = wait3(&statloc,WNOHANG,NULL)) > 0) {
int exitcode = WEXITSTATUS(statloc);
int bysignal = 0;
listNode *ln;
sentinelScriptJob *sj;
// 获取造成脚本终止的信号
if (WIFSIGNALED(statloc)) bysignal = WTERMSIG(statloc);
sentinelEvent(LL_DEBUG,"-script-child",NULL,"%ld %d %d",
(long)pid, exitcode, bysignal);
// 根据pid查找并返回正在运行的脚本节点
ln = sentinelGetScriptListNodeByPid(pid);
if (ln == NULL) {
serverLog(LL_WARNING,"wait3() returned a pid (%ld) we can't find in our scripts execution queue!", (long)pid);
continue;
}
sj = ln->value;
// 如果退出码是1并且没到脚本最大的重试数量
if ((bysignal || exitcode == 1) &&
sj->retry_num != SENTINEL_SCRIPT_MAX_RETRY)
{ // 取消正在执行的标志
sj->flags &= ~SENTINEL_SCRIPT_RUNNING;
sj->pid = 0;
// 设置下次执行脚本的时间
sj->start_time = mstime() +
sentinelScriptRetryDelay(sj->retry_num);
// 脚本不能重新执行
} else {
// 发送脚本错误的事件通知
if (bysignal || exitcode != 0) {
sentinelEvent(LL_WARNING,"-script-error",NULL,
"%s %d %d", sj->argv[0], bysignal, exitcode);
}
// 从脚本队列中删除脚本
listDelNode(sentinel.scripts_queue,ln);
// 释放一个脚本任务结构和所有关联的数据
sentinelReleaseScriptJob(sj);
// 目前正在执行脚本的数量减1
sentinel.running_scripts--;
}
}
}
3.3.4 杀死超时脚本
Sentinel规定一个脚本最多执行60s,如果执行超时,则会杀死正在执行的脚本。
void sentinelKillTimedoutScripts(void) {
listNode *ln;
listIter li;
mstime_t now = mstime();
listRewind(sentinel.scripts_queue,&li);
// 遍历脚本队列
while ((ln = listNext(&li)) != NULL) {
sentinelScriptJob *sj = ln->value;
// 如果当前脚本正在执行且执行,且脚本执行的时间超过60s
if (sj->flags & SENTINEL_SCRIPT_RUNNING &&
(now - sj->start_time) > SENTINEL_SCRIPT_MAX_RUNTIME)
{ // 发送脚本超时的事件
sentinelEvent(LL_WARNING,"-script-timeout",NULL,"%s %ld",
sj->argv[0], (long)sj->pid);
// 杀死执行脚本的子进程
kill(sj->pid,SIGKILL);
}
}
}
3.4 脑裂
在Redis的官方Sentinel文档中给出了一种关于脑裂的场景。
+----+ +----+
| M1 |---------| R1 |
| S1 | | S2 |
+----+ +----+
Configuration: quorum = 1
// M1是主节点
// R1是从节点
// S1、S2是哨兵节点
在此种情况中,如果主节点M1出现故障,那么R1将被晋升为主节点,因为两个Sentinel节点可以就配置的quorum = 1达成一致,并且会执行故障转移操作。如下图所示:
+----+ +------+
| M1 |----//-----| [M1] |
| S1 | | S2 |
+----+ +------+
如果执行了故障转移之后,就会完全以对称的方式创建了两个主节点。客户端可能会不明确的写入数据到两个主节点,这就可能造成很多严重的后果,例如:争抢服务器的资源,争抢应用服务,数据损坏等等。
因此,最好不要进行这样的部署。
在哨兵模式的主函数sentinelTimer(),为了防止这样的部署造成的一些后果,所以每次执行后都会更改服务器的周期任务执行频率,如下所述:
server.hz = CONFIG_DEFAULT_HZ + rand() % CONFIG_DEFAULT_HZ;
不断改变Redis定期任务的执行频率,以便使每个Sentinel节点都不同步,这种不确定性可以避免Sentinel在同一时间开始完全继续保持同步,当被要求进行投票时,一次又一次在同一时间进行投票,因为脑裂导致有可能没有胜选者。
4. 哨兵的使命
sentinel.c文件详细注释:Redis Sentinel详细注释
该部分在Redis Sentinel实现(下)中单独剖析。
Java 面试宝典是大明哥全力打造的 Java 精品面试题,它是一份靠谱、强大、详细、经典的 Java 后端面试宝典。它不仅仅只是一道道面试题,而是一套完整的 Java 知识体系,一套你 Java 知识点的扫盲贴。
它的内容包括:
- 大厂真题:Java 面试宝典里面的题目都是最近几年的高频的大厂面试真题。
- 原创内容:Java 面试宝典内容全部都是大明哥原创,内容全面且通俗易懂,回答部分可以直接作为面试回答内容。
- 持续更新:一次购买,永久有效。大明哥会持续更新 3+ 年,累计更新 1000+,宝典会不断迭代更新,保证最新、最全面。
- 覆盖全面:本宝典累计更新 1000+,从 Java 入门到 Java 架构的高频面试题,实现 360° 全覆盖。
- 不止面试:内容包含面试题解析、内容详解、知识扩展,它不仅仅只是一份面试题,更是一套完整的 Java 知识体系。
- 宝典详情:https://www.yuque.com/chenssy/sike-java/xvlo920axlp7sf4k
- 宝典总览:https://www.yuque.com/chenssy/sike-java/yogsehzntzgp4ly1
- 宝典进展:https://www.yuque.com/chenssy/sike-java/en9ned7loo47z5aw
目前 Java 面试宝典累计更新 400+ 道,总字数 42w+。大明哥还在持续更新中,下图是大明哥在 2024-12 月份的更新情况:

想了解详情的小伙伴,扫描下面二维码加大明哥微信【daming091】咨询
同时,大明哥也整理一套目前市面最常见的热点面试题。微信搜[大明哥聊 Java]或扫描下方二维码关注大明哥的原创公众号[大明哥聊 Java] ,回复【面试题】 即可免费领取。