B树
B-树,就是B树,B树的原英文名是B-tree,所以很多翻译为B-树,就会很多人误以为B-树是一种树、B树是另外一种树。其实,B-tree就是B树。
B-树的定义
B树(B-tree)是一种树状数据结构,是 一种平衡的多路查找树 ,能够用来存储排序后的数据。这种数据结构能够让查找数据、循序存取、插入数据及删除的动作,都在对数时间内完成。B树,概括来说是一个一般化的二叉查找树,可以拥有多于2个子节点。与自平衡二叉查找树不同,B-树为系统最优化大块数据的读和写操作。B-tree算法减少定位记录时所经历的中间过程,从而加快存取速度。这种数据结构常被应用在数据库和文件系统的实作上。
一棵m阶的B-树,或为空树,或为满足下列特性的m叉树:
(1)树中每个结点至多有m棵子树(m>=2)。
(2)除非根结点为叶子结点,否则至少有两棵子树。
(3)除根之外的所有非终端结点至少有┌m/2┐棵子树。
(4)每个结点存放至少m/2-1(取上整)和至多m-1个关键字;(至少2个关键字)
(5)非叶子结点的关键字个数=指向儿子的指针个数-1;
(6)所有的非终端结点的结构如下:

其中,k1,k2,...,kn为n个按从小到大顺序排列的键值;
(7)所有叶子结点在同一个层次上,且不含有任何信息。
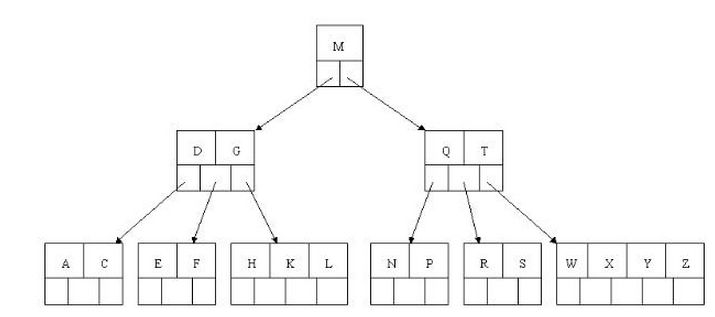
下图是一棵四阶(m=5)B_树的示意图,该树共有四层,所有叶子点均在第四层上。这里为了理解方便我就直接用实际字母的大小来排列C>B>A)(注:通常树结点的首位置要存储此结点的有效数据个数)
B树的查询流程
如上图我要从上图中找到E字母,查找流程如下
(1)获取根节点的关键字进行比较,当前根节点关键字为M,E<M(26个字母顺序),所以往找到指向左边的子节点(二分法规则,左小右大,左边放小于当前节点值的子节点、右边放大于当前节点值的子节点);
(2)拿到关键字D和G,D<E<G 所以直接找到D和G中间的节点;
(3)拿到E和F,因为E=E 所以直接返回关键字和指针信息(如果树结构里面没有包含所要查找的节点则返回null);
B树的插入(建立)节点
关键字插入的位置必定在最下 层的非叶结点,有下列几种情况:
1)插入后,该结点的关键字个数n<m, 不修改指针;
2)插入后,该结点的关键字个数 n=m, 则需进行“结点分裂”,令 s =┌m/2┐, 在原结点中保留 (A0,K1,…… , Ks-1,As-1); 建新结点 (As,Ks+1,…… ,Kn,An); 将(Ks,p)插入双亲结点;
3)若双亲为空,则建新的根结点。
例如:定义一个5阶树(平衡5路查找树),现在要把3、8、31、11、23、29、50、28 这些数字构建出一个5阶树出来
a. 先插入 3、8、31、11
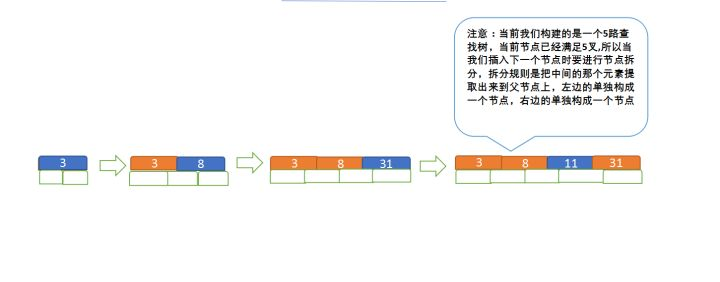
b. 再插入23、29
插入23时,m=5了,而因5阶树关键字数必<=5-1,所以在┌m/2┐处拆分。
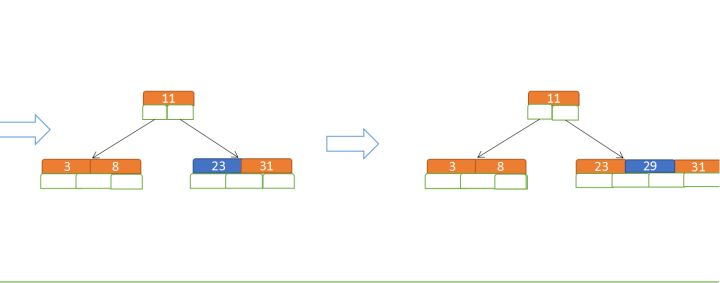
c. 再插入50、28
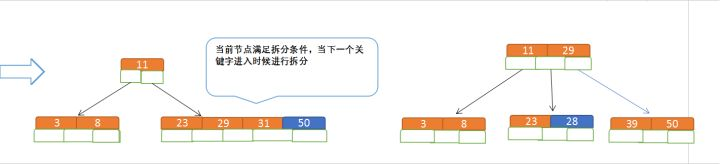
同理,插入50时,m<5,所以不用改变。而插入28时与b步骤相同。
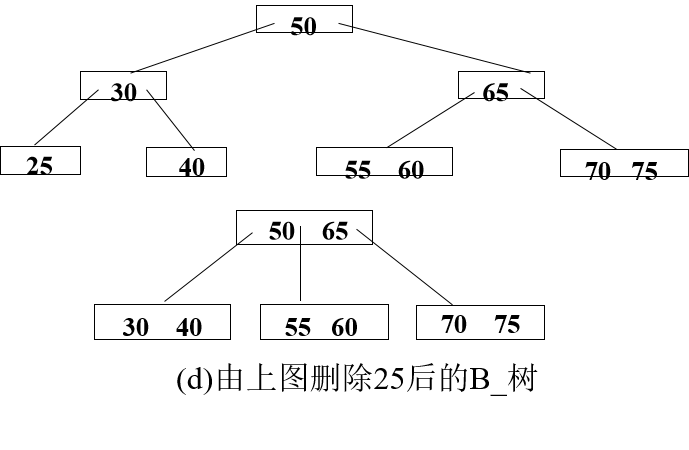
B树节点的删除
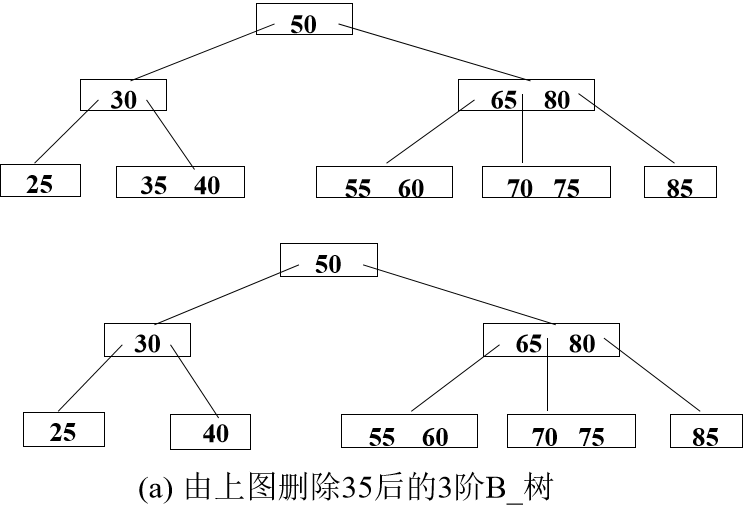
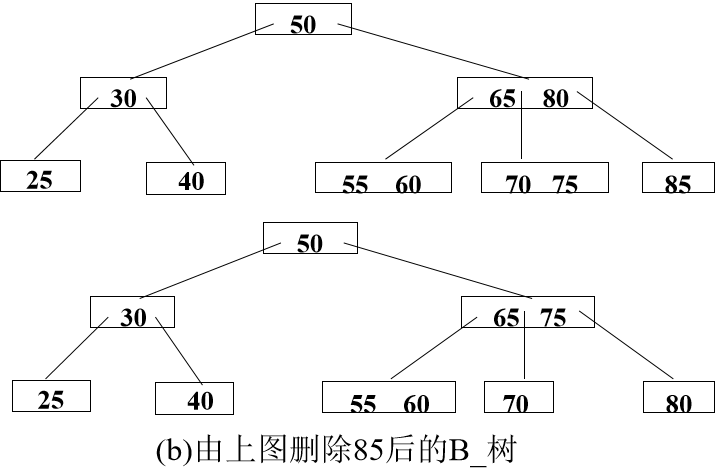
(1) 在深度为(h+l)的m阶B-树中删除一个键值k,首先要查到键值k所在的结点及在结点中的位置。若k在非终端节点中,则把该结点的右边(或左边)指针所指子树中的最小(或最大)键值与k对调,使k移到终端节点。
(2) 在终端节点中删除一个键值后,使得该结点的值个数n减1,此时应分以下三种情况进行处理:
a. 若删除后结点中键值数目 n≥ ┌m/2┐-1 ,在该结点中删去键值k连同右边的指针。
b. 若删除后结点中键值数目n< ┌m/2┐-1,且左(或右)兄弟结点的关键字数目> ┌m/2┐-1,则把左(或右)兄弟结点中最大(或最小)键值移到父结点中,再把父结点大于(或小于)上移键值的键值下移到被删关键字所在结点中。
c. 若删除后结点中键值数目n< ┌m/2┐-1,及其左、右兄弟结点的键值数目都等于┌m/2┐-1,则就必须进行结点的“合并”,即把应删的键值删去后,将该结点中的剩余键值和指针连同父结点中指向该结点指针的左边(或右边)一个键值ki一起合并到左兄弟(或右兄弟)结点中,将ki从父结点中删去。如果因此使父结点中关键字数目< ┌m/2┐-1,则对此父结点做同样处理,以致于可能直到对根结点做这样的处理而使整个树减少一层。
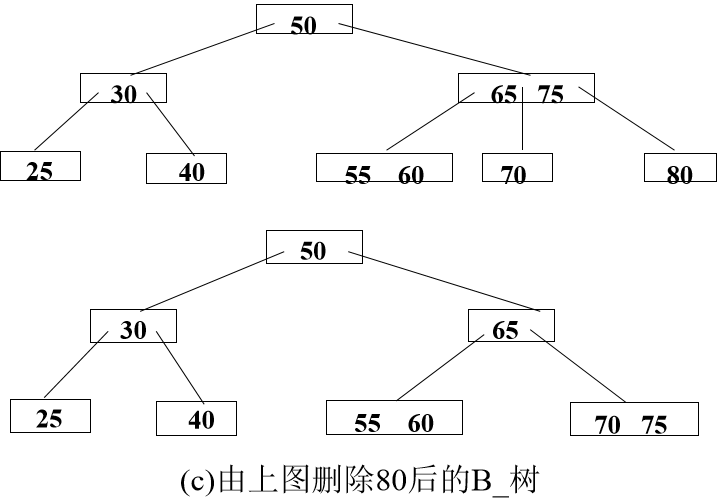
如果因此使父结点中关键字数目< ┌m/2┐-1,则对此父结点做同样处理,以致于可能直到对根结点做这样的处理而使整个树减少一层。
B树特点:
B树相对于平衡二叉树的不同是,每个节点包含的关键字增多了,特别是在B树应用到数据库中的时候,数据库充分利用了磁盘块的原理(磁盘数据存储是采用块的形式存储的,每个块的大小为4K,每次IO进行数据读取时,同一个磁盘块的数据可以一次性读取出来)把节点大小限制和充分使用在磁盘快大小范围;把树的节点关键字增多后树的层级比原来的二叉树少了,减少数据查找的次数和复杂度;
B+树
B+树是B树的一个升级版,相对于B树来说B+树更充分的利用了节点的空间,让查询速度更加稳定,其速度完全接近于二分法查找。为什么说B+树查找的效率要比B树更高、更稳定;我们先看看两者的区别。
B+树是B树的变体,也是一种多路搜索树,其定义基本与B-树相同,除了:
- 1)非叶子结点的子树指针与关键字个数相同;
- 2)非叶子结点的子树指针P[i],指向关键字值属于[K[i], K[i+1])的子树(B-树是开区间);
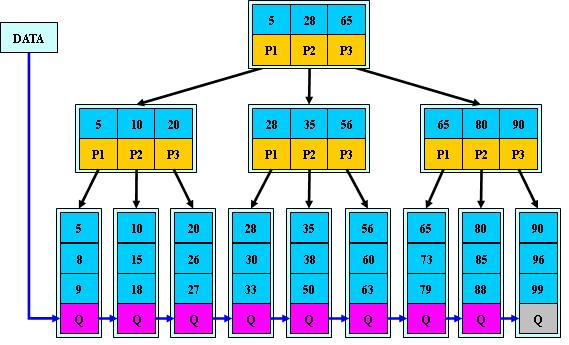
- 3)为所有叶子结点增加一个链指针;
- 4)所有关键字都在叶子结点出现;
B+树的搜索与B树也基本相同,区别是B+树只有达到叶子结点才命中(B树可以在非叶子结点命中),其性能也等价于在关键字全集做一次二分查找;
B+树的性质:
- 1.所有关键字都出现在叶子结点的链表中(稠密索引),且链表中的关键字恰好是有序的;
- 2.不可能在非叶子结点命中;
- 3.非叶子结点相当于是叶子结点的索引(稀疏索引),叶子结点相当于是存储(关键字)数据的数据层;
- 4.更适合文件索引系统。
如(m=3):
B+树比B树更适合操作系统的文件索引和数据库索引的原因:
- B+树的磁盘读写代价更低,B+树的内部节点没有指向关键字具体信息的指针,因此内部节点相对B树更小。如果把所有同一内部节点的关键字放在同一块磁盘中,盘块所能容纳的关键字数量也就越多,一次性读入内存中的需要查找的关键字也就越多,相对IO读写次数降低。
- B+树的查询效率更加稳定
由于非终结点并不是最终指向文件内容的结点,而只是叶子结点中关键字的索引。所以任何关键字的查找必须走一条从根结点到叶子结点的路。所有关键字查询的路径长度相同,导致每一个数据的查询效率相当。
所以,B+树只要遍历叶子节点就可以实现整棵树的遍历,支持基于范围的查询,而B树不支持range-query这样的操作(或者说效率太低)。
B*树
B∗树是B+树的变体,在B+树的非根和非叶子结点再增加指向兄弟的指针,将结点的最低利用率从1/2提高到2/3。
B∗树定义了非叶子结点关键字个数至少为2/3M,即块的最低使用率为2/3(代替B+树的1/2);
B+树的分裂:当一个结点满时,分配一个新的结点,并将原结点中1/2的数据复制到新结点,最后在父结点中增加新结点的指针;B+树的分裂只影响原结点和父结点,而不会影响兄弟结点,所以它不需要指向兄弟的指针;
B∗树的分裂:当一个结点满时,如果它的下一个兄弟结点未满,那么将一部分数据移到兄弟结点中,再在原结点插入关键字,最后修改父结点中兄弟结点的关键字(因为兄弟结点的关键字范围改变了);如果兄弟也满了,则在原结点与兄弟结点之间增加新结点,并各复制1/3的数据到新结点,最后在父结点增加新结点的指针;
所以,B∗树分配新结点的概率比B+树要低,空间使用率更高。
特点
在B+树的基础上因其初始化的容量变大,使得节点空间使用率更高,而又存有兄弟节点的指针,可以向兄弟节点转移关键字的特性使得B*树额分解次数变得更少;

参考:
1、https://zhuanlan.zhihu.com/p/27700617
2、https://blog.csdn.net/v_JULY_v/article/details/6530142/
3、https://blog.csdn.net/endlu/article/details/51720299
4、https://www.cnblogs.com/nullzx/p/8729425.html
Java 面试宝典是大明哥全力打造的 Java 精品面试题,它是一份靠谱、强大、详细、经典的 Java 后端面试宝典。它不仅仅只是一道道面试题,而是一套完整的 Java 知识体系,一套你 Java 知识点的扫盲贴。
它的内容包括:
- 大厂真题:Java 面试宝典里面的题目都是最近几年的高频的大厂面试真题。
- 原创内容:Java 面试宝典内容全部都是大明哥原创,内容全面且通俗易懂,回答部分可以直接作为面试回答内容。
- 持续更新:一次购买,永久有效。大明哥会持续更新 3+ 年,累计更新 1000+,宝典会不断迭代更新,保证最新、最全面。
- 覆盖全面:本宝典累计更新 1000+,从 Java 入门到 Java 架构的高频面试题,实现 360° 全覆盖。
- 不止面试:内容包含面试题解析、内容详解、知识扩展,它不仅仅只是一份面试题,更是一套完整的 Java 知识体系。
- 宝典详情:https://www.yuque.com/chenssy/sike-java/xvlo920axlp7sf4k
- 宝典总览:https://www.yuque.com/chenssy/sike-java/yogsehzntzgp4ly1
- 宝典进展:https://www.yuque.com/chenssy/sike-java/en9ned7loo47z5aw
目前 Java 面试宝典累计更新 400+ 道,总字数 42w+。大明哥还在持续更新中,下图是大明哥在 2024-12 月份的更新情况:

想了解详情的小伙伴,扫描下面二维码加大明哥微信【daming091】咨询
同时,大明哥也整理一套目前市面最常见的热点面试题。微信搜[大明哥聊 Java]或扫描下方二维码关注大明哥的原创公众号[大明哥聊 Java] ,回复【面试题】 即可免费领取。